Here is the summarization of the tasks accomplished in week 6 of the project
25.11 #
- start on the driving/light-searching code
- update plan
I continuously need to make changes to my concept, to make up for time and material restrictions. I’m not sure how much is feasible to get done, so I will start with the most important features, and work upwards from there

26.11 #
- Test code for light function
I made the decision to keep the arduino in front of the robot, under the distance sensor. it works. I need a cover for it, and preferably a cover for the distance sensor in front of that again
- find resin cover that can be screwed to robot and attatch put with polyplast
- test out soil moisture sensor
the water pump motor has 12V. how do I connect it to my 5V board?
- test out pump
27.11 #
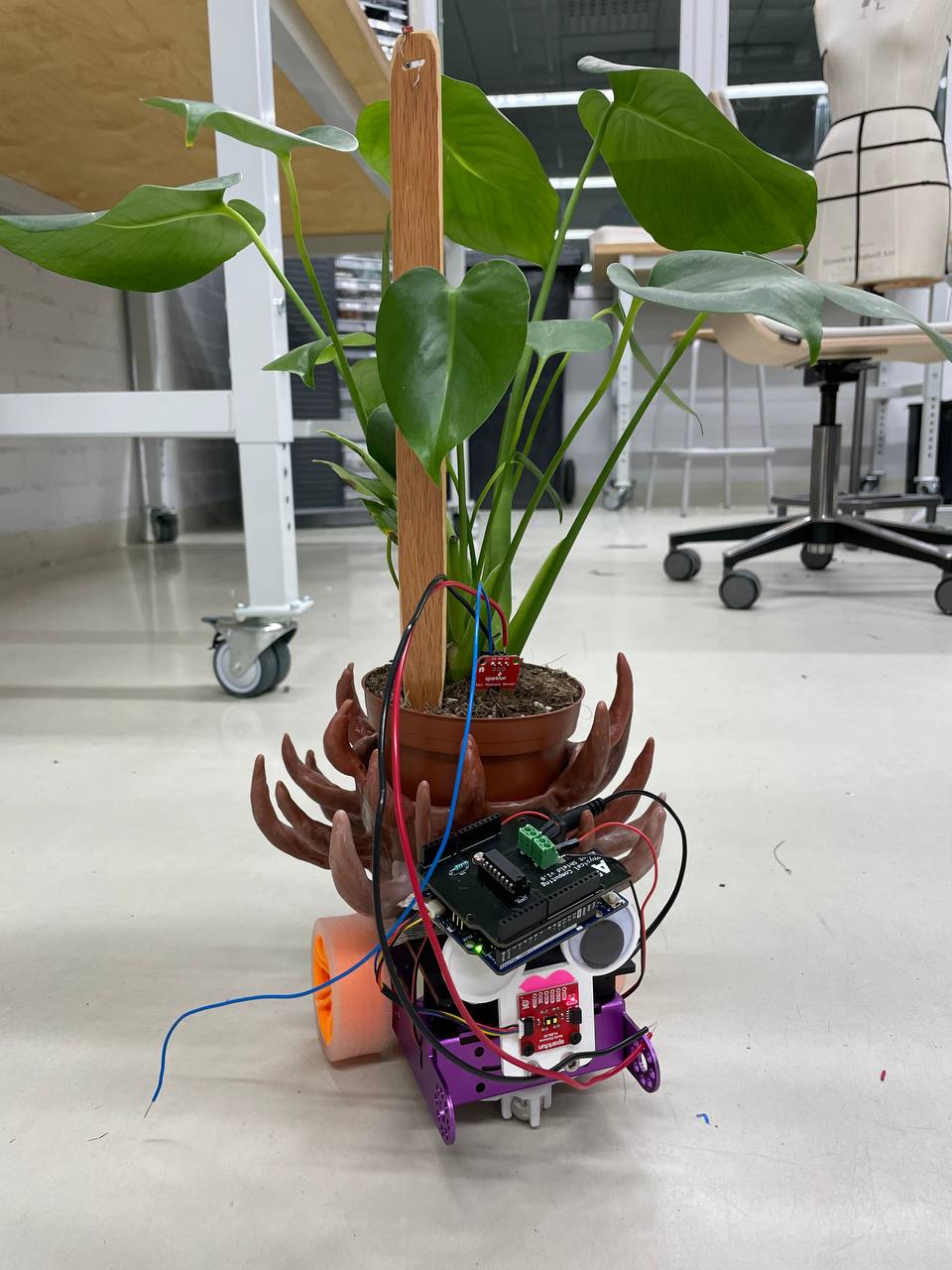
there was already a light sensor in the arduino robot redboard provided in class, but in my case it was important that the light sensor is above and up in the plant, where the sun would hit it.
- make stick for light sensor
I found a scrap piece of wood and sawed, carved and filed it to a suitable shape that can hold my light sensor.

28.11 #
I’ve come to a point where I need to rethink some things. Many details in my project weren’t clear from the beginning, and I approached this with an “figure it out as I go”-attitude. Now the robot works just as an automated plant that can take care of itself. That’s good and all, but not what I really wanted to achieve message-wise. Using the water pump to anything more than “just” watering the plant would be complicated. If I want to also retaliate with a water-sprutsj on the user, I need another pump or motor system.
Therefore, considering how important self defense and consent is for my idea and the time I have on hand, I’m considering having the behaviour be that you can only water the plant when it is thirsty, otherwise it will do something else. either run away (not very self defense-y but still impactful imo) or yield a weapon, a simpler one than a water gun. I could make a “sword” and have the plant swing it fex. or make a noise with a speaker

to do:
-
rewire light sensor
-
Test new light sensor
-
make a cover for arduino that can hold the front distance sensor
- 3d print it
-
run a test to see if 5v can drive pot and plant
It can! yay!! its slower, but thats perfect. so happy!
one issue is that sometimes it turns, and other times it drives straight. I’m not sure why. Theres nothing in front of the distance sensor. I damaged one of the motor wires earlier, that could be a reason.. nvm the distance sensor was just too unstable
29.11 #
- assemble the bot
- test
this week has consisted of a LOT of est driving!