Initial Minimum Viable Test #
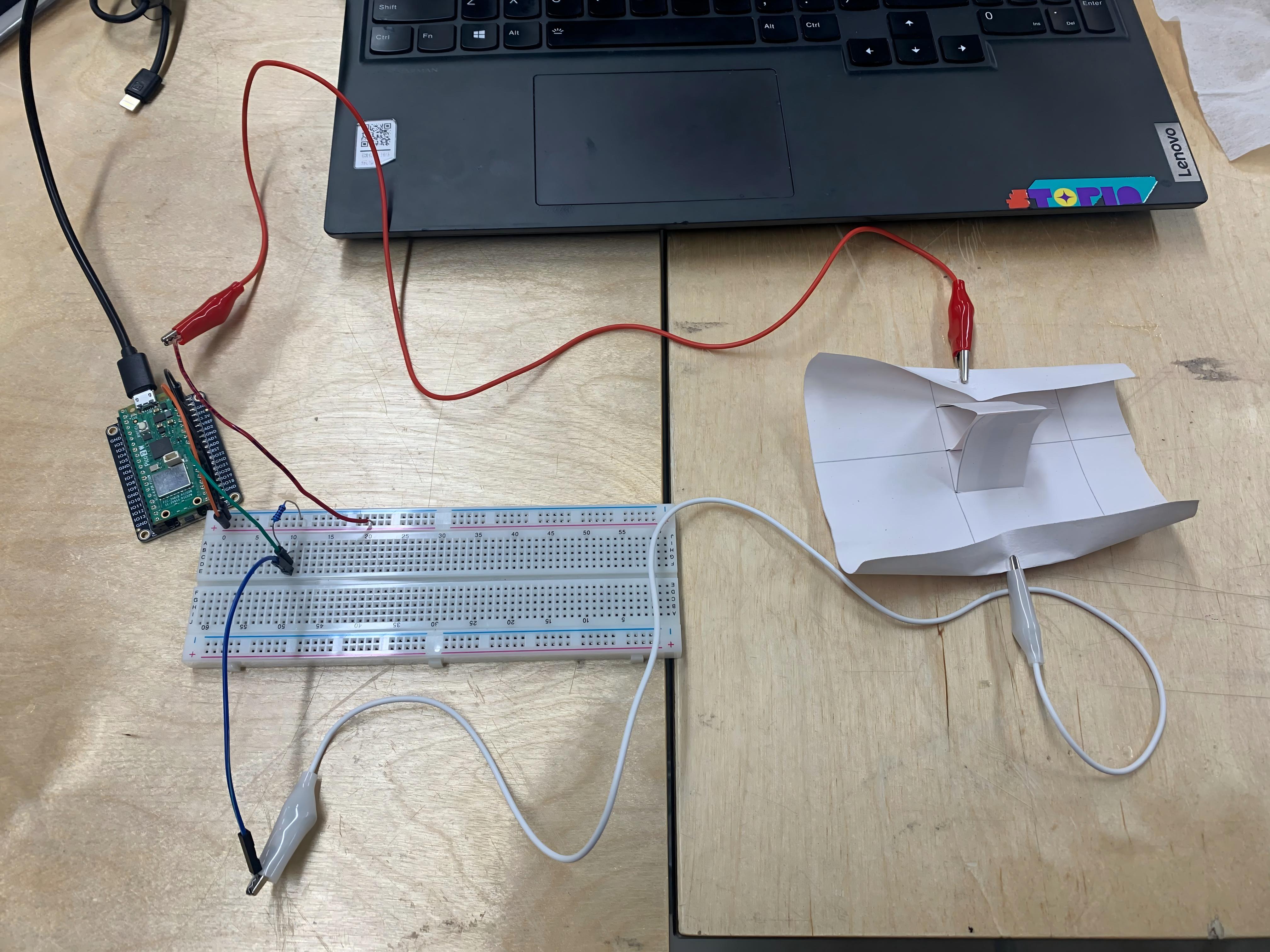
Blow Structure Test #
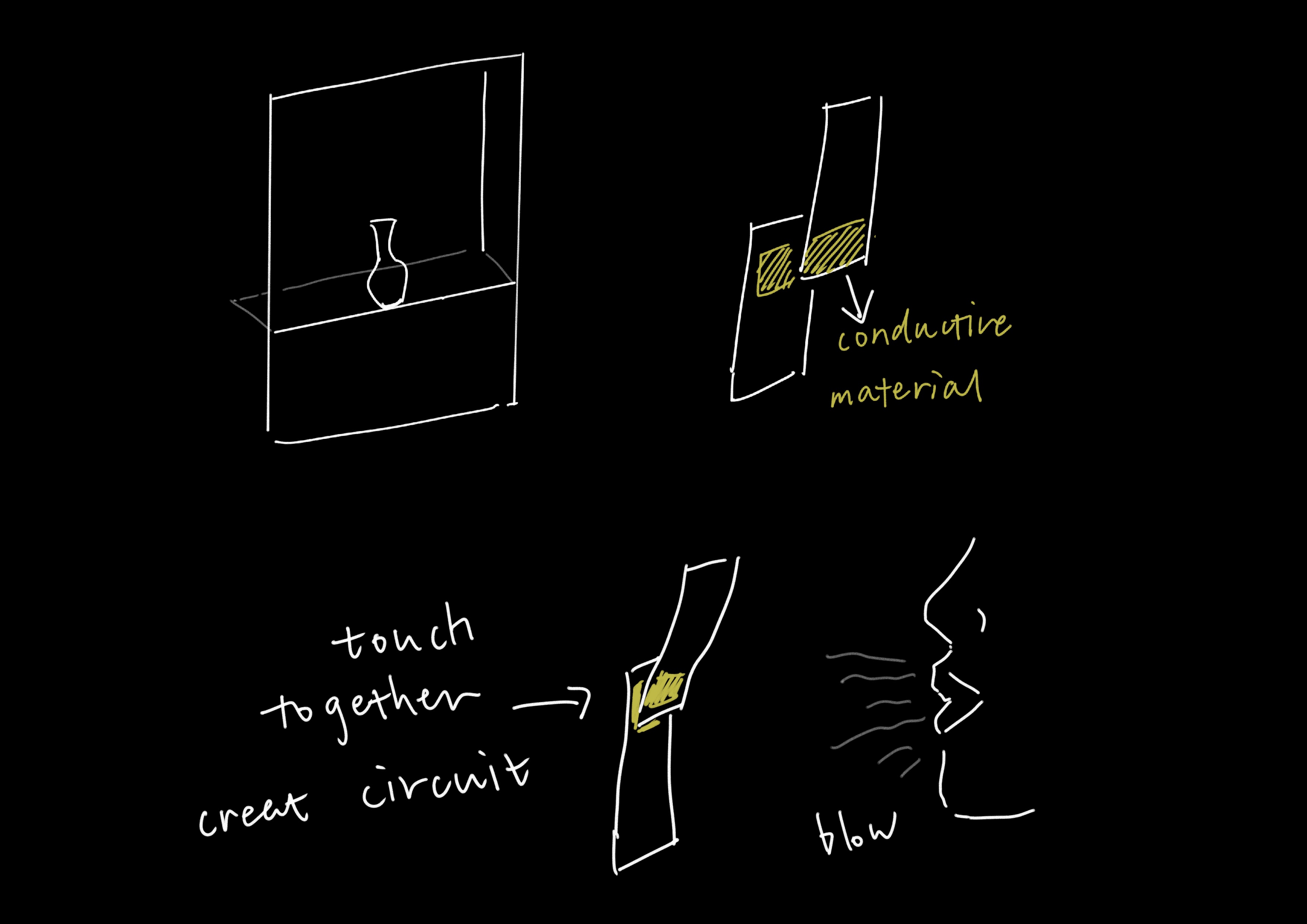
At first the circuit counldn’t give the correct HIGH/LOW signal as I expected. From Matti I know there is two problems:
- The glue on the back of the conductive tape is not conductive, so you can’t make it discontinuous;
- Matti suggest for testing I should use bread board to connect the components to prevent the unstable serial transformation.
Arduino & Processing Connection #
This is my initial Arduino code:
int i;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
pinMode(21,INPUT);
}
void loop() {
// put your main code here, to run repeatedly:
i = digitalRead(21);
Serial.println(i);
}
and here is the Processing code:
import processing.serial.*;
Serial myPort; // Create object from Serial class
int val; // Data received from the serial port
void setup()
{
// On Windows machines, this generally opens COM1.
// Open whatever port is the one you're using.
String portName = Serial.list()[2]; //change the 0 to a 1 or 2 etc. to match your port
myPort = new Serial(this, portName, 9600);
}
void draw()
{
println(val);
}
But the problem is the signal look fine in the arduino serial monitor, but in processing I can’t print the signal. It only shows 0. With Matti’s help I know that there are several problems behind:
- The speed arduino sending the signals is faster than the processing refeshing(60FPS), so I need to add a
delay(30)in arduino. This is the explaination of Gemini: set the Arduino delay to 30ms (approx. 33Hz) to maintain a safe 1:2 ratio with Processing’s 60Hz read rate, ensuring the buffer clears faster than it fills to prevent data backlog.- The code
println(val)is not actually getting the serial data so that I need to usestr = myPort.readStringUntil('\n');. But this only gets theStringtype of data(pure text) but I needintorfloat, so Matti says I need use thisval = float(str);to force the data become a float. But at first we want to tryint(), but there is some unknown error, but float works fine. The code I got that can actually work is this:
import processing.serial.*;
Serial myPort; // Create object from Serial class
float val; // Data received from the serial port
String str;
void setup()
{
// On Windows machines, this generally opens COM1.
// Open whatever port is the one you're using.
println(Serial.list());
String portName = Serial.list()[0];
myPort = new Serial(this, portName, 9600);
//myPort.bufferUntil('\n');
}
void draw()
{
background(255);
if ( myPort.available() > 0) { // If data is available,
str = myPort.readStringUntil('\n'); // read it and store it in str
//
//println(str);
if(str != null){
//String[] splitData = split(str, ","); // I'll need this for more int
val = float(str); // change the text we get into real number we can do calculation
// y = float(splitData[1]);
// z = float(splitData[2]);
}
}
println(val);
text(val,20,20);
}
Here is the final prototype that works with simple visual in processing:
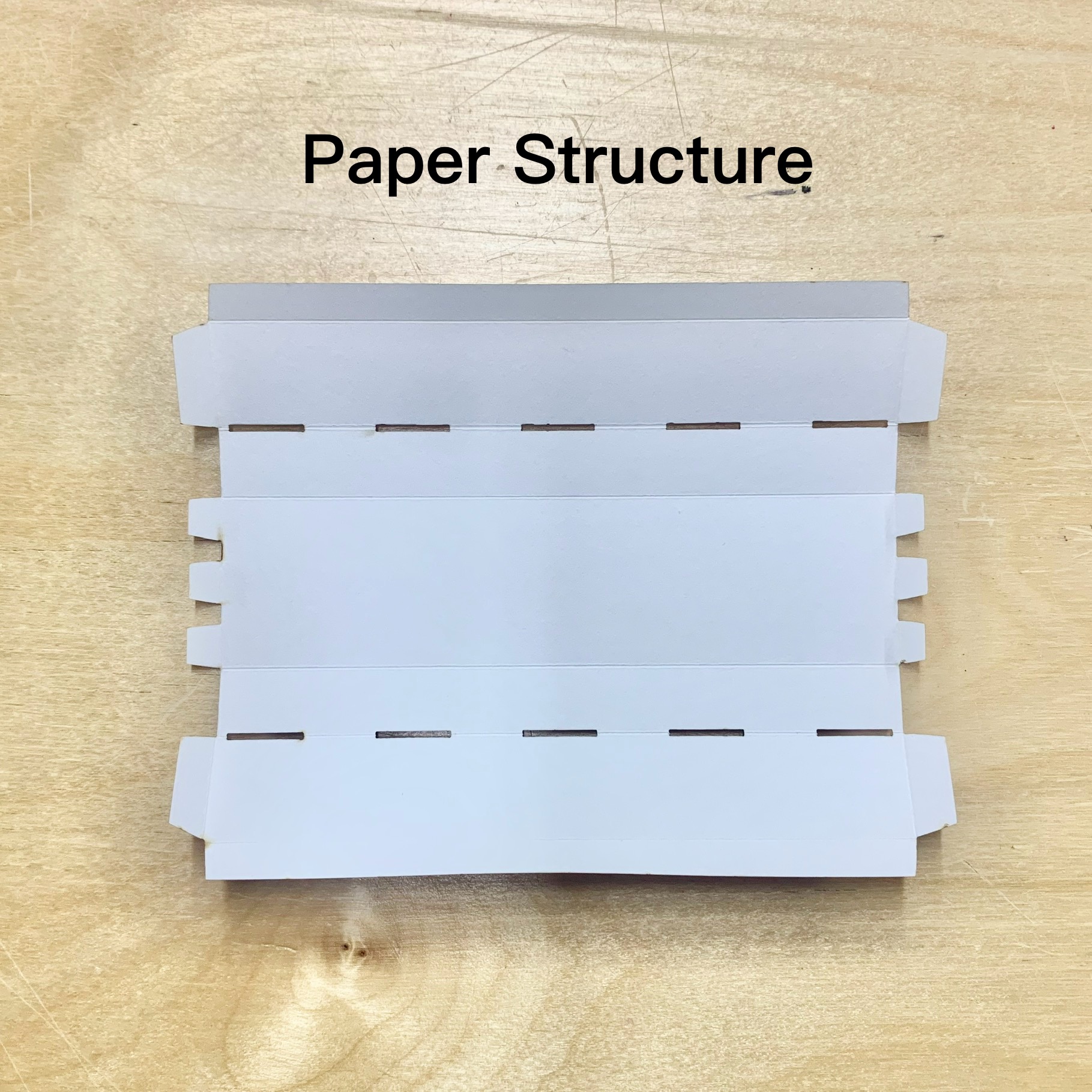
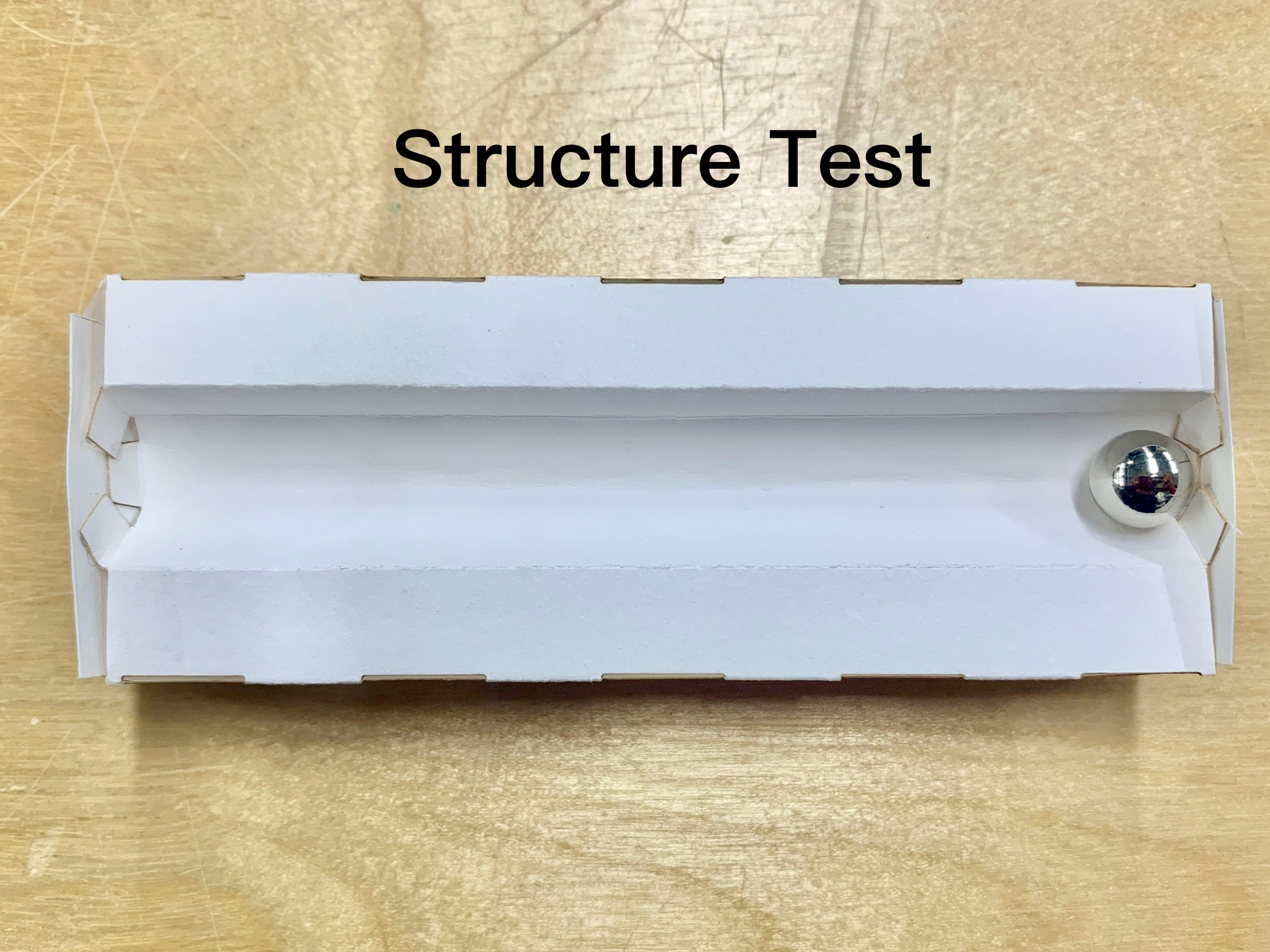
Ball-Slide Sensor Structure Test #
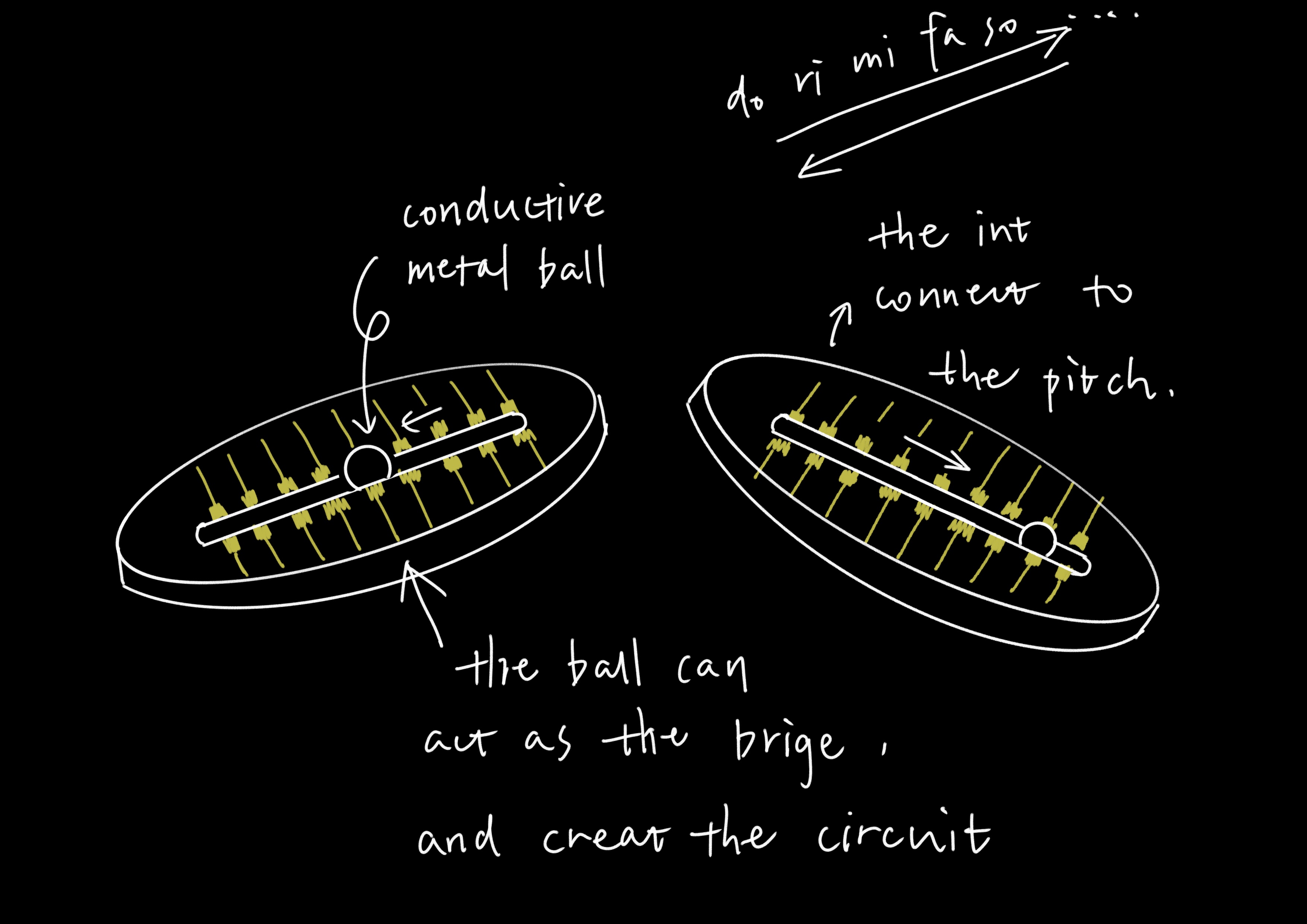
The first version works if I use conductive tap to be the bridge of every pair of interrupts, but I failed to reach my goal of using the ball as trigger. Here is the initial version that failed:
There are several reasons I concluded from this:
- The width of the conductive tap areas now is 5mm, is should be bigger for the ball to touch and stay;
- The diameter of ball I use now is 6mm, I should use bigger ball to increase the conductive area(so I got myself some 1.2mm large ones);
- Also for increasing the conductive region, instead to the current flat structure, I should use a “U valley” shape as the ball-rolling zone.
The second prototype version can give me a signal when I pivoted the box up side down! But to make this stable, I must squeeze this box a little bit to provide more contact area between the ball and the surface, which means that I should design a structure that bends to fit the ball shape.
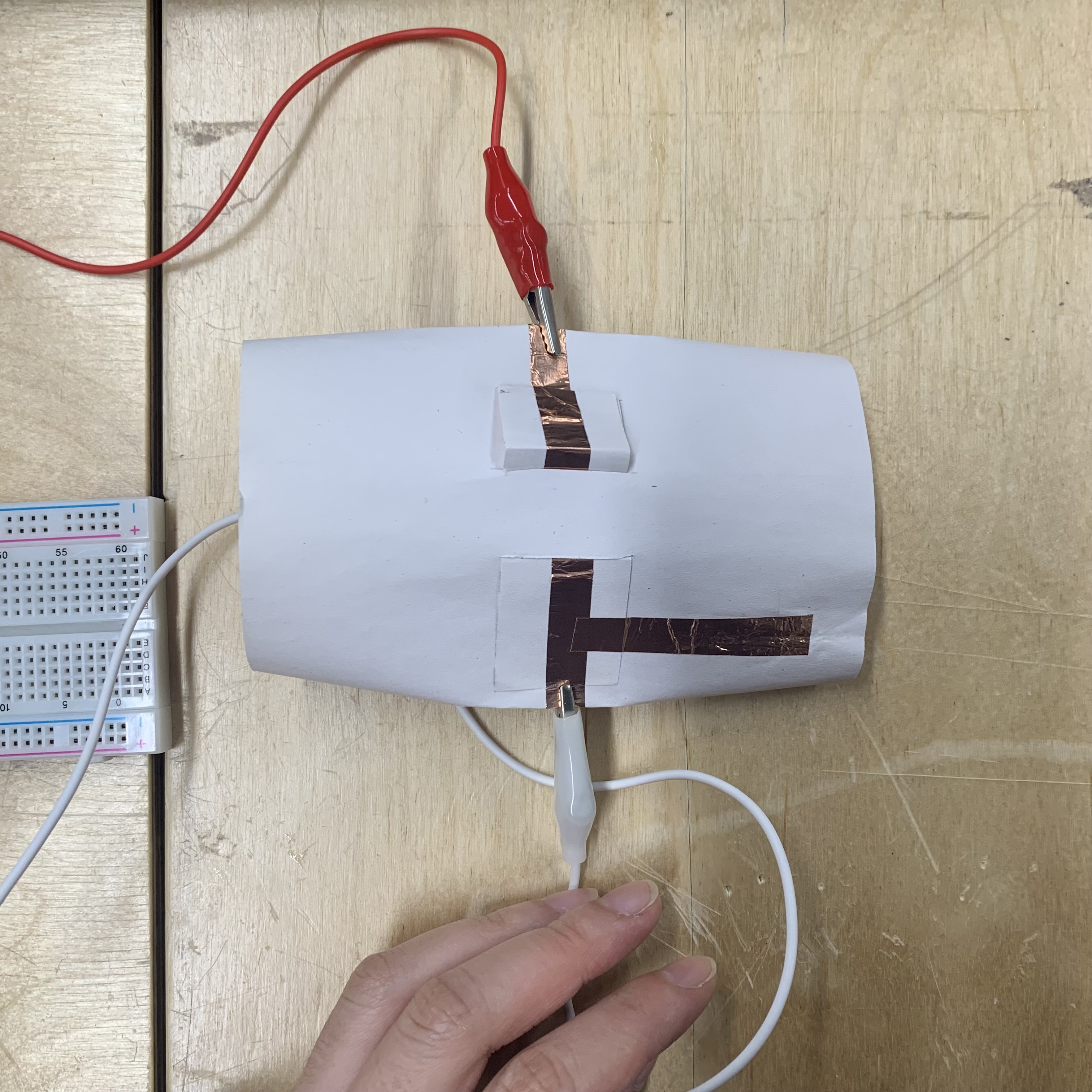
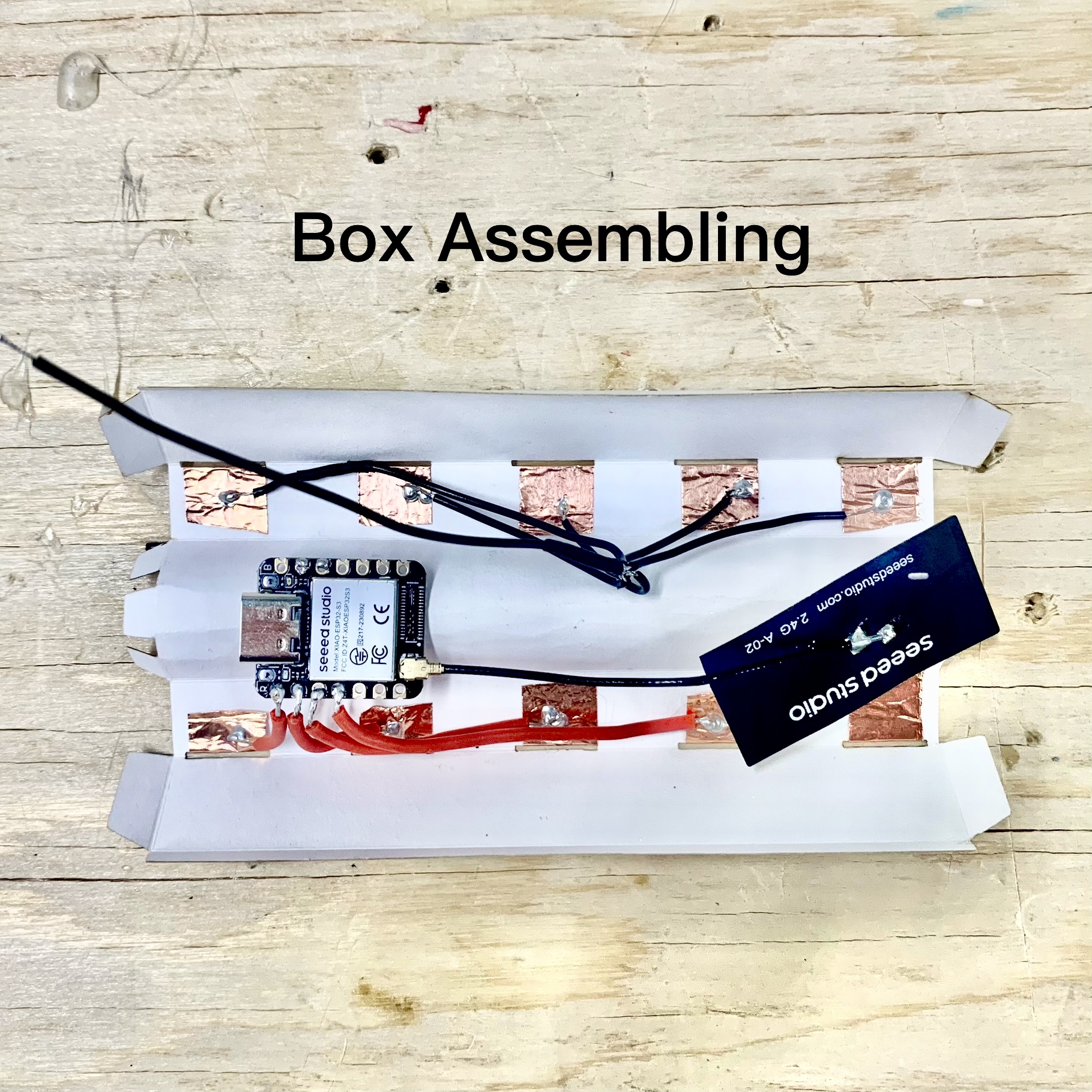
Paper Folding Sensor Structure Test #
When I was introducing this idea to everyone in our class, it is really interesting to find that people all played this before, so I guess this interaction must be a fun experience as a connection of their childhood memories and familiar gestures. The final prototype works like this:
Although in concern of time, I don’t have enough effort to use this sensor as a trigger of something, but I think in the future I can do some with this. Also, I have summarized some after prototyping:
- The electric wires should use the soft ones with more flexibility;
- The plus and minus side soldering should be carefully avoided touching when pressing two side together.
Final Prototype Structure #
Coding Part #
Arduino Code #
Ball OSC_codeToProcessing #
#include <WiFi.h>
#include <ArduinoOSCWiFi.h>
// WiFi stuff
const char* ssid = "mainframe";
const char* pwd = "12345678";
// OSC setting
// computer ip address
const char* host = "192.168.50.231";
const int recv_port = 12345; // Arduino recieve com
const int publish_port = 54321; // Arduino send com
float ballA,ballB,ballC,ballD,ballE;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
// WiFi ------------------>
// WiFi stuff (no timeout setting for WiFi)
WiFi.mode(WIFI_STA);
// Connect to the WiFi network
WiFi.begin(ssid,pwd);
while (WiFi.status() != WL_CONNECTED) {
Serial.print(".");
delay(500);
}
Serial.print("WiFi connected, IP = ");
Serial.println(WiFi.localIP()); // print arduino's own IP
// subscribe to receive osc messages that control the robot
OscWiFi.subscribe(recv_port, "/control",
[](const OscMessage& m) {
Serial.print(m.remoteIP());
Serial.print(" ");
Serial.print(m.remotePort());
Serial.print(" ");
Serial.print(m.size());
Serial.print(" ");
Serial.print(m.address());
Serial.print(" ");
Serial.print("Value: ");
float val = m.arg<float>(0);
Serial.println(val);
});
//ball pin
pinMode(D0,INPUT_PULLUP);
pinMode(D1,INPUT_PULLUP);
pinMode(D2,INPUT_PULLUP);
pinMode(D3,INPUT_PULLUP);
pinMode(D4,INPUT_PULLUP);
}
void loop() {
// update the OSC sending and receiving
OscWiFi.update();
// put your main code here, to run repeatedly:
//ball serial define
ballA=digitalRead(D0);
ballB=digitalRead(D1);
ballC=digitalRead(D2);
ballD=digitalRead(D3);
ballE=digitalRead(D4);
OscWiFi.send(host, publish_port, "/sensors",
ballA, // index 1
ballB, // index 2
ballC, // index 3
ballD, // index 4
ballE // index 5
);
Serial.print("A: ");
Serial.print(ballA);
Serial.print("B: ");
Serial.print(ballB);
Serial.print("C: ");
Serial.print(ballC);
Serial.print("D: ");
Serial.print(ballD);
Serial.print("E: ");
Serial.println(ballE);
delay(30);
}
BLOW_OSC_codeToProcessing #
#include <WiFi.h>
#include <ArduinoOSCWiFi.h>
// WiFi stuff
const char* ssid = "mainframe";
const char* pwd = "12345678";
// OSC setting
// computer ip address
const char* host = "192.168.50.231";
const int recv_port = 12345; // Arduino recieve com
const int publish_port = 54321; // Arduino send com
float blow;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
// WiFi ------------------>
// WiFi stuff (no timeout setting for WiFi)
WiFi.mode(WIFI_STA);
// Connect to the WiFi network
WiFi.begin(ssid,pwd);
while (WiFi.status() != WL_CONNECTED) {
Serial.print(".");
delay(500);
}
Serial.print("WiFi connected, IP = ");
Serial.println(WiFi.localIP()); // print arduino's own IP
// subscribe to receive osc messages that control the robot
OscWiFi.subscribe(recv_port, "/control",
[](const OscMessage& m) {
Serial.print(m.remoteIP());
Serial.print(" ");
Serial.print(m.remotePort());
Serial.print(" ");
Serial.print(m.size());
Serial.print(" ");
Serial.print(m.address());
Serial.print(" ");
Serial.print("Value: ");
float val = m.arg<float>(0);
Serial.println(val);
});
//blow pin
pinMode(D10,INPUT_PULLUP);
}
void loop() {
// update the OSC sending and receiving
OscWiFi.update();
// put your main code here, to run repeatedly:
//blow serial define
blow=digitalRead(D10);
OscWiFi.send(host, publish_port, "/sensors_2",
blow
);
// 1. Blow
Serial.print("ValBlow: ");
Serial.println(blow);
delay(30);
}
Processing Code #
// connect arduino with processing
import oscP5.*;
import netP5.*;
OscP5 oscP5;
NetAddress myRemoteLocation;
float valBlow, prevBlow=0, blowCount=0; // reserve sata received from the serial port
float valBallA,valBallB,valBallC,valBallD,valBallE;
//Box2D library
import shiffman.box2d.*;
import org.jbox2d.common.*;
import org.jbox2d.dynamics.joints.*;
import org.jbox2d.collision.shapes.*;
import org.jbox2d.collision.shapes.Shape;
import org.jbox2d.common.*;
import org.jbox2d.dynamics.*;
import org.jbox2d.dynamics.contacts.*;
Box2DProcessing box2d;
Boundary mainFloor; // save the floor
//Boundary part
ArrayList<Boundary> walls; //save the walls
//the variable need for boundary transformation
float ang, smoothFactor=0.1, activeAng; // the angle for the boundary twist
float BallPins[] = {valBallA,valBallB,valBallC,valBallD,valBallE};
float targetAngles[] = {radians(30), radians(14.5), radians(0), radians(-14.5), radians(-30)};
float smoothingFactor = 0.1;
float finalTarget = 0;
boolean isSoundActive;
//Object part
String[] dictA = {"but", "time", "is", "a", "wind", "that", "never", "stops", "blowing", "from", "dust", "we", "rise", "and", "to", "dust", "we", "shall", "return", "breaking", "apart", "into", "atoms", "into", "memories", "into", "light"};
String[] dictB = {"we", "are", "made", "of", "starstuff", "we", "are", "a", "way", "for"};
String[] dictC = {"a", "fleeting", "moment", "of", "being","in", "the", "vast", "design", "gravity", "holds", "us", "for", "a", "while"};
String[] dictD = {"the", "cosmos", "to", "know", "itself"};
Dandelion[] dandelions = new Dandelion[4];
Body centerAnchor;
//delay the trigger
boolean isWaiting = false;
int startTime = 0;
int targetIndex = -1;
//the center coordinates
float ori_X;
float ori_Y;
boolean isBlown = false;
//the sound part
import ddf.minim.*;
Minim minim;
AudioPlayer windPlayer;
AudioPlayer bgMusic;
float targetPan, currentPan = 0.5;
//reset the dandelion
int resetStartTime = 0;
boolean isResetting = false;
void setup()
{
size(1920,1080);
//OSC setting
frameRate(60);
//XIAO send ---> processing
oscP5 = new OscP5(this, 54321);
//processing gives order to ---> XIAO //maybe I dont need but keep it
myRemoteLocation = new NetAddress("192.168.50.172", 12345);
minim = new Minim(this);
windPlayer = minim.loadFile("soft_wind.mp3"); //load the widn sound effect
windPlayer.setGain(10.0);
bgMusic = minim.loadFile("bg_forest.mp3");
bgMusic.loop();
bgMusic.setGain(5.0);
//give value to the center of the dandelion
ori_X = width/2;
ori_Y = 200;
//Box2D part
box2d = new Box2DProcessing(this);
box2d.createWorld();
box2d.setGravity(0, -50);
mainFloor = new Boundary(width/2, height + 100, width+300, 300, radians(ang));
walls = new ArrayList<Boundary>();
walls.add(new Boundary(0, height/2, 20, height, 0)); //left wall
walls.add(new Boundary(width, height/2, 20, height, 0));
//Object dandelions
float spacing = width / 5.0;
dandelions[0] = new Dandelion(width/2-350, height*0.65, 90, 90, 90, 20, 90, dictB);
dandelions[1] = new Dandelion(width/2+450, height*0.72, -90, 40, -90, 40, 90, dictD);
dandelions[2] = new Dandelion(width/2+150, height*0.55, -90, 90, -20, -20, 110, dictC);
dandelions[3] = new Dandelion(width/2-220, height*0.35, 160, 160, 160, 90, 120, dictA);
box2d.listenForCollisions();
}
void draw()
{
//refresh the BallPins value
BallPins = new float[]{valBallA, valBallB, valBallC, valBallD, valBallE};
background(0);
//serials shows on the window
fill(255);
textSize(15);
text("Blow"+valBlow,40,100);
text("valBallA"+valBallA,40,140);
text("valBallB"+valBallB,40,160);
text("valBallC"+valBallC,40,180);
text("valBallD"+valBallD,40,200);
text("valBallE"+valBallE,40,220);
//sound panning part
if(valBallA == 1) targetPan = 0.0;
else if(valBallB == 1) targetPan = 0.25;
else if(valBallC == 1) targetPan = 0.5;
else if(valBallD == 1) targetPan = 0.75;
else if(valBallE == 1) targetPan = 1.0;
//println(targetPan);
currentPan=currentPan+(targetPan-currentPan)*smoothFactor;
float minimPan = map(currentPan,0,1,-1,1);
windPlayer.setPan(minimPan);
//detect blow
if (valBlow == 1 && prevBlow == 0)
{
if (!isWaiting)
{
int foundIndex = -1;
//go through all the dandelions, find the first !isBlown
for (int i = 0; i < dandelions.length; i++)
{
if (dandelions[i].isBlown == false)
{
foundIndex = i;
windPlayer.rewind();
windPlayer.play();
break; //if find, stop loop
}
}
//if find a dandelion that is not blown
if (foundIndex != -1)
{
targetIndex = foundIndex;
startTime = millis(); // recored time
isWaiting = true; // start to break mode
}
}
}
if (isWaiting)
{
if (millis() - startTime >= 800)
{
if(targetIndex != -1 && targetIndex < dandelions.length)
{
dandelions[targetIndex].blow();
}
isWaiting = false;
}
}
prevBlow = valBlow; //refresh last state
Vec2 wind = new Vec2(50, random(-10, 10));
//Dandelion display
for (Dandelion d : dandelions)
{
d.display();
d.applyWind(wind);
}
//Box2D part
box2d.step();
mainFloor.display();
//boundary display
for (Boundary wall: walls)
{
wall.display();
}
turn(); // execute boundary transformation
//reset dandelion
boolean allBlown = true;
//detect whether all of them has bee blown
for (Dandelion d : dandelions)
{
if (!d.isBlown)
{
allBlown = false;
break;
}
}
if (allBlown && !isResetting)
{
resetStartTime = millis();
isResetting = true;
}
//if in resetMode, check time, execute reset after 5s
if (isResetting)
{
if (millis() - resetStartTime > 15000)
{
for (Dandelion d : dandelions) //execute reset
{
d.reset();
}
isResetting = false;
blowCount = 0;
targetIndex = -1;
isWaiting = false;
}
}
}
//get the signal from arduino
void oscEvent(OscMessage theOscMessage)
{
if (theOscMessage.checkAddrPattern("/sensors") == true)
{
valBallA = 1-theOscMessage.get(0).floatValue();
valBallB = 1-theOscMessage.get(1).floatValue();
valBallC = 1-theOscMessage.get(2).floatValue();
valBallD = 1-theOscMessage.get(3).floatValue();
valBallE = 1-theOscMessage.get(4).floatValue();
println("matti_1");
}
if (theOscMessage.checkAddrPattern("/sensors_2") == true)
{
valBlow = 1-theOscMessage.get(0).floatValue();
println("matti_2");
}
}
Boundary #
class Boundary
{
// A boundary is a simple rectangle with x,y,width,and height
float x,y,w,h,angle;
// But we also have to make a body for box2d to know about it
Body b;
Boundary(float x,float y, float w, float h, float angle)
{
this.x = x;
this.y = y;
this.w = w;
this.h = h;
this.angle = angle;
PolygonShape sd = new PolygonShape();
// Figure out the box2d coordinates
float box2dW = box2d.scalarPixelsToWorld(w/2);
float box2dH = box2d.scalarPixelsToWorld(h/2);
// We're just a box
sd.setAsBox(box2dW, box2dH);
// Create the body
BodyDef bd = new BodyDef();
bd.type = BodyType.KINEMATIC;
bd.position.set(box2d.coordPixelsToWorld(x,y)); //send boundary position to libray
//processing is clockwise, Box2D is anticlockwise
bd.angle = -angle; // send angle
b = box2d.createBody(bd); // create object
// Attached the shape to the body using a Fixture, name of this Fixture is fd
FixtureDef fd = new FixtureDef();
fd.shape = sd;
fd.density = 1;
// Friction: 0(like ice), 1(sticky like glue)
fd.friction = 0.1;
fd.restitution = 0.5;
// create this Fixture fd
b.createFixture(fd);
b.setUserData(this);
b.setUserData(this);
}
void display()
{
fill(0);
stroke(0);
rectMode(CENTER);
pushMatrix();
translate(x,y);
rotate(angle);
rect(0,0,w,h);
popMatrix();
}
void updateAngle(float newAngle) {
this.angle = newAngle;
// get the new position of boundary in Box2D world
Vec2 currentPos = b.getPosition();
//let the position fit possessing clockwise direction
b.setTransform(currentPos, -newAngle);
}
}
Boundary Twist #
void turn()
{
int currentIndex = -1;
for(int i=0; i<BallPins.length; i++)
{
if(BallPins[i]==1.0)
{
currentIndex = i;
}
}
if(currentIndex != -1)
{
activeAng = targetAngles[currentIndex];
}
ang=ang+(activeAng-ang)*smoothFactor;
mainFloor.updateAngle(ang);
//println(ang);
}
Collision #
void beginContact(Contact cp)
{
Fixture f1 = cp.getFixtureA();
Fixture f2 = cp.getFixtureB();
Body b1 = f1.getBody();
Body b2 = f2.getBody();
Object o1 = b1.getUserData();
Object o2 = b2.getUserData();
if (o1 == null || o2 == null) return;
if (o1.getClass() == WordParticles.class && o2.getClass() == Boundary.class)
{
groundParticle((WordParticles) o1);
}
else if (o2.getClass() == WordParticles.class && o1.getClass() == Boundary.class)
{
groundParticle((WordParticles) o2);
}
else if (o1.getClass() == WordParticles.class && o2.getClass() == WordParticles.class)
{
WordParticles p1 = (WordParticles) o1;
WordParticles p2 = (WordParticles) o2;
if (p1.hasHitGround && !p2.hasHitGround)
{
groundParticle(p2);
}
else if (!p1.hasHitGround && p2.hasHitGround)
{
groundParticle(p1);
}
}
}
void groundParticle(WordParticles p)
{
if (!p.hasHitGround)
{
p.hasHitGround = true;
p.body.setLinearDamping(0.5);
p.scheduleSound(); //trigger text particle sound
}
}
Dandelion #
class Dandelion
{
float x, y; //the center of the dandelion
ArrayList<WordParticles> particles; //list of the seed
ArrayList<Joint> joints; //list of the joints
Body centerAnchor; //list of the anchors
boolean isBlown = false;
float stemAlpha = 255;
String[] dict;
float radius;
float cx1, cy1, cx2, cy2; // the offset for drawing the stem lines
Dandelion(float x, float y, float cx1, float cy1, float cx2, float cy2, float r, String[] dict)
{
this.x = x;
this.y = y;
this.dict = dict;
this.radius = r;
this.cx1 = cx1;
this.cy1 = cy1;
this.cx2 = cx2;
this.cy2 = cy2;
particles = new ArrayList<WordParticles>();
joints = new ArrayList<Joint>();
createBody();
}
void createBody()
{
//create the body
BodyDef bd = new BodyDef();
bd.position.set(box2d.coordPixelsToWorld(x, y));//send boundary position to libray
bd.type = BodyType.STATIC;
centerAnchor = box2d.createBody(bd);
//create the seeds
int totalSeeds = max(20,dict.length);
for (int i = 0; i < totalSeeds; i++)
{
float angle = map(i, 0, totalSeeds, 0, TWO_PI);
float px = x + this.radius * cos(angle);
float py = y + this.radius * sin(angle);
String txt = dict[i % dict.length];
WordParticles p = new WordParticles(px, py, txt);
particles.add(p);
DistanceJointDef djd = new DistanceJointDef();
djd.bodyA = centerAnchor;
djd.bodyB = p.body;
djd.length = box2d.scalarPixelsToWorld(this.radius);
djd.frequencyHz = 3.0;
djd.dampingRatio = 0.1;
Joint j = box2d.world.createJoint(djd);
joints.add(j);
}
}
//start blowing
void blow()
{
if (!isBlown)
{
for (Joint j : joints)
{
box2d.world.destroyJoint(j);
}
joints.clear();
isBlown = true;
}
}
void applyWind(Vec2 windForce)
{
if (isBlown)
{
for (WordParticles p : particles)
{
p.body.applyForce(windForce, p.body.getWorldCenter());
}
//if isBlown, let stem disapear
if (stemAlpha > 0) stemAlpha = stemAlpha - 2;
}
}
void display()
{
noFill();
stroke(250, 255, 255, stemAlpha);
strokeWeight(2);
bezier(x, y, x + cx1, y + cy1, x + cx2, height - cy2, x, height);
for (WordParticles p : particles)
{
p.updateSound(); // use for detect delay sound play
p.display();
}
}
void reset()
{
isBlown = false;
stemAlpha = 255;
int totalSeeds = particles.size();
for (int i = 0; i < totalSeeds; i++)
{
float angle = map(i, 0, totalSeeds, 0, TWO_PI);
float px = x + this.radius * cos(angle);
float py = y + this.radius * sin(angle);
WordParticles p = particles.get(i);
p.resetPos(px, py);
// the same with createBody
DistanceJointDef djd = new DistanceJointDef();
djd.bodyA = centerAnchor;
djd.bodyB = p.body;
djd.length = box2d.scalarPixelsToWorld(this.radius);
djd.frequencyHz = 3.0;
djd.dampingRatio = 0.1;
Joint j = box2d.world.createJoint(djd);
joints.add(j);
}
}
}
Text Particles Object #
class WordParticles
{
float w;
float h;
String content;
Body body;
color col;
boolean hasHitGround = false;
//sound play variable
boolean hasPlayed = false;
boolean isScheduled = false;
long triggerTime = 0;
//every textParticle has its own sound
AudioSample mySound;
WordParticles(float x, float y, String c)
{
this.content = c;
//col = color(random(50), random(100, 200), random(200, 255));//random blue
col = 255;
//load audio files according to text content
try
{
//go to file data to find the name of its audio
mySound = minim.loadSample(content + ".mp3", 512);
}
catch (Exception e)
{
println("Could not load sound for: " + content);
}
//set the physical box accodingt to the text size
textSize(30);
w = textWidth(content);
h = textAscent() + textDescent();
//padding
float padding = 2;
w = w + padding;
h = h + padding;
//create a object with w&h at the pos of (x,y)
makeBody(new Vec2(x, y), w, h);
}
void display()
{
//invisible physical body part
//get the position ofbody on screen
Vec2 pos = box2d.getBodyPixelCoord(body);
//get the rotate angle of body, save into a
float a = body.getAngle();
//draw this object on window according to the pos&rotate of the body
pushMatrix();
translate(pos.x, pos.y);
rotate(-a);
fill(col);
noStroke();
textAlign(CENTER, CENTER);
textSize(28);
text(content, 0, 0);
popMatrix();
}
//create a body with physical attributes in Box2D world
void makeBody(Vec2 center, float w, float h)
{
this.w= w;
this.h = h;
//body define
BodyDef bd = new BodyDef();
bd.type = BodyType.DYNAMIC;
bd.position.set(box2d.coordPixelsToWorld(center));//screen to world coordinates switch
//high damping makes it float like a seed/feather
bd.linearDamping = 8;
bd.angularDamping = 1.0;
//the birth of this body
body = box2d.createBody(bd);
//let the object change physical state accorfing to boundary twist
body.setSleepingAllowed(false);
//Figure out the box2d coordinates
PolygonShape sd = new PolygonShape();
float box2dW = box2d.scalarPixelsToWorld(w/2);
float box2dH = box2d.scalarPixelsToWorld(h/2);
sd.setAsBox(box2dW, box2dH);
//defien fixture(texture)
FixtureDef fd = new FixtureDef();
fd.shape = sd;
//low density so wind affects it easily
fd.density = 0.5;
fd.friction = 0.3;
fd.restitution = 0.2;
//attach the fixture to body
body.createFixture(fd);
body.setUserData(this);
body.setAngularVelocity(random(-1, 1));
}
void resetPos(float x, float y)
{
Vec2 pos = box2d.coordPixelsToWorld(x, y);
body.setTransform(pos, 0); //return to previous position
body.setLinearVelocity(new Vec2(0,0));
body.setAngularVelocity(0);
body.setLinearDamping(8.0);
hasHitGround = false;
hasPlayed = false;
isScheduled = false;
}
void scheduleSound()
{
if (isScheduled || hasPlayed) return;
isScheduled = true;
int delay = (int)random(100, 11000);
triggerTime = millis() + delay;
}
void updateSound()
{
if (isScheduled && !hasPlayed)
{
if (millis() >= triggerTime)
{
playSound();
hasPlayed = true;
}
}
}
void playSound()
{
if (mySound != null)
{
float randomGain = random(-20.0, -80.0);
mySound.setGain(randomGain);
mySound.trigger();
}
}
}